Per il mese di dicembre, relativamente allo sconto in fattura, attendiamo il rinnovo della finanziaria per il 2024
Bonus detrazione fiscale del
75%
Home » Piattaforme elevatrici per disabili
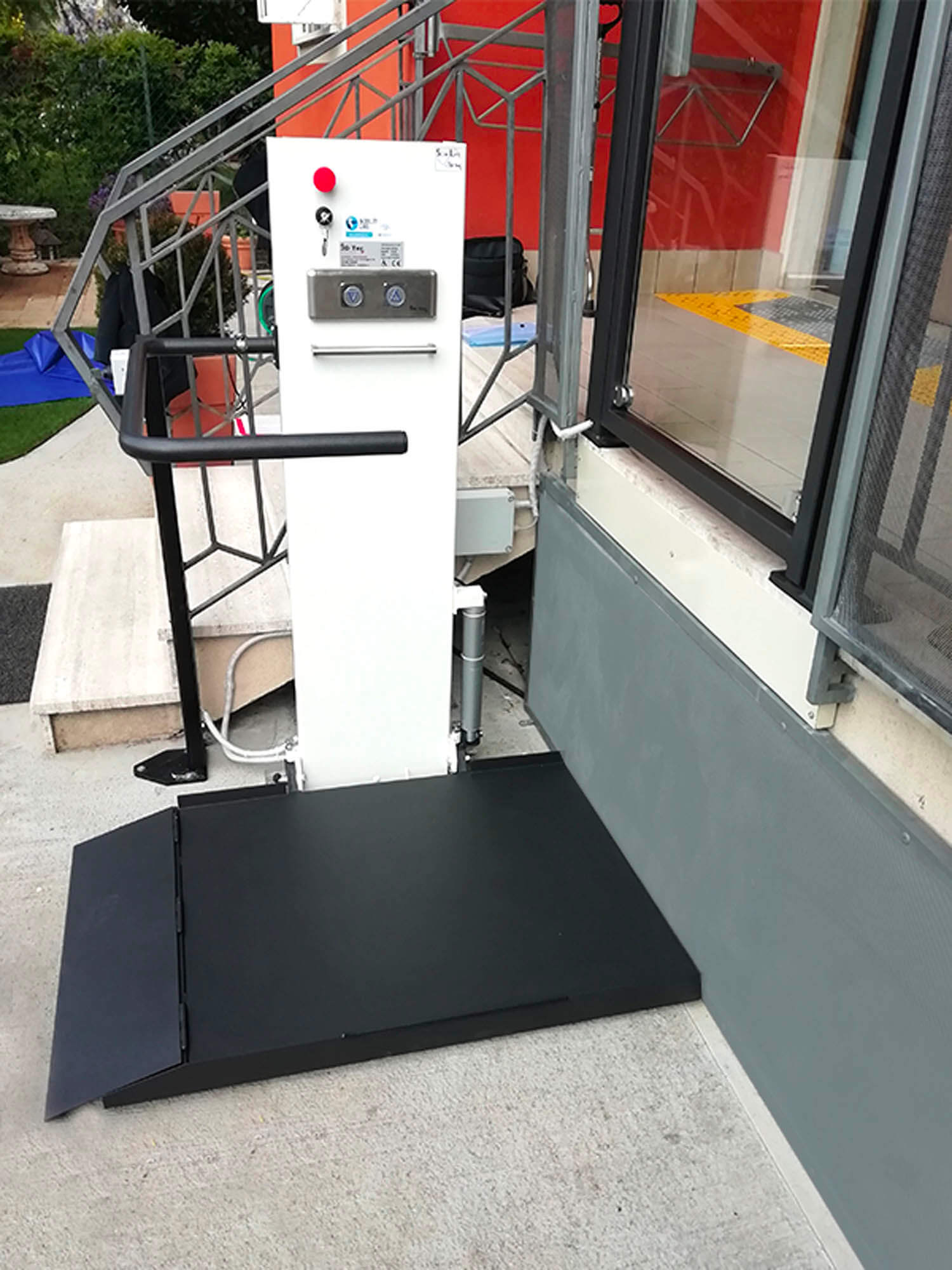
Le piattaforme elevatrici per anziani e disabili, più comunemente chiamate anche elevatori a vano aperto, sono silenziose nei movimenti e concepite per rendere accessibile dislivelli verticali fino a 3 metri di altezza
Queste soluzioni garantiscono autonomia e libertà di movimento a persone con importanti difficoltà deambulatorie, che utilizzano una sedia a rotelle o semplicemente anche a persone che abitano al primo piano e desiderano facilitare gli spostamenti di passeggini o il trasporto quotidiano di merce come la spesa.
I minielevatori a vano aperto, chiamate anche piattaforma elevatrici, suppliscono alle funzioni di miniascensori per la casa!
Il design raffinato e curato nel dettaglio permette ai nostri mini elevatori di integrarsi perfettamente al contesto abitativo di pregio valorizzando l’ambiente in cui si trovano sia dal punto di vista estetico che dal punto di vista funzionale.
Le nostre pedane di sollevamento possono essere installate all’interno o all’esterno degli edifici pubblici o privati e sono costruite secondo direttiva macchine (Direttiva Macchine 2006/42/CE e Direttiva C.E.M. 2004/108/CE) garantendoti un agevole superamento delle barriere architettoniche nel rispetto delle norme descritte dal D.M. 236/89.

gli ambienti domestici

nei movimenti

della persona

di infortuni



Fatti guidare dall’esperienza!
Mobility Care vanta una ultradecennale esperienza nella vendita di piattaforme elevatrici per anziani e disabili
75%
Grazie a questo Bonus per l’abbattimento barriere architettoniche è possibile risparmiare più di metà del costo! Potrai recuperare il 75% in 5 anni.
Un team interno dedicato è a tua disposizione per fornirti tutte le informazioni necessarie in merito a questo Bonus!
Riacquista la possibilità di vivere i tuoi spazi in piena autonomia!
Muoverti liberamente in casa e fuori casa! Ti aiuterà a recuperare quella fiducia in te stesso e la serenità che solo quegli ostacoli apparentemente insormontabili ti avevano tolto, migliorando la qualità del la tua vita.

Siamo qui per te!
Spesso una persona anziana o con difficoltà di deambulazione vede come priorità la possibilità di vivere con la massima indipendenza i locali all’interno della casa.
Mobility Care fornisce tutta una serie di dispositivi studiati per superare le barriere architettoniche in ambiente domestico garantendone la fruizione in piena sicurezza.
Come operiamo
Le installazioni vengono effettuate tranquillamente in casa e fuori casa, all’esterno e all’interno di spazi comuni di condominio e di edifici pubblici purché si osservino le normative riguardanti il superamento delle barriere architettoniche.
Un nostro consulente effettuerà un sopralluogo gratuito per proporti, in base alle tue esigenze, quale piattaforma elevatrice risulti essere ideale.
Installazione e manutenzione degli elevatori a vano aperto
Le pratiche di installazione ed il processo di manutenzione degli elevatori a vano aperto non sono dissimili da quelle degli altri ausili per anziani, ma con il supporto di Mobility Care tutto sarà più agevole.
Scelto il tuo prodotto ideale in base alle tue necessità devi tener presente quali sono le pratiche di cui hai bisogno per poter procedere con l’installazione e la manutenzione degli elevatori a vano aperto.
Nel momento in cui decidi di installare una piattaforma elevatrice fissa, si deve preventivamente presentare l’opportuna richiesta di Inizio Attività (SCIA, DIA, CILA o CIL) al Comune dove si trova l’immobile che necessita dell’intervento attraverso un professionista qualificato come un Geometra, un Architetto o un Ingegnere.
Una volta ottenuta l’autorizzazione, Mobility Care potrà procedere all’installazione del tuo montacarichi domestico. Conclusa la posa in opera di questo ausilio per anziani, dovrai fare la comunicazione al Comune che ti rilascerà un numero matricola essenziale alla registrazione della manutenzione obbligatoria semestrale da parte della nostra azienda autorizzata. Per il disbrigo delle pratiche potrai scegliere di essere assistito direttamente da Mobility Care al fine di ottenere l’impianto chiavi in mano senza neanche muoverti da casa.
L’installazione di una delle nostre piattaforme elevatrici può necessitare di alcune opere murarie quali la realizzazione di una piccola fossa dove risiede la base autoportante della macchina.
Dove è possibile consigliamo di installare un elevatore domestico a vano aperto rispetto ad un servoscala a piattaforma perché ha il vantaggio di essere leggermente più economico e risulta essere molto più apprezzabile sia dal punto di vista funzionale che dal punto di vista architettonico in quanto studiato con finiture ad alto livello qualitativo rendendolo accattivante nel design tanto da considerarlo un elemento di pregio all’interno del contesto abitativo.
Mobility Care si occupa anche della vendita di servoscala per anziani, montascale, mini ascensori e rampe per disabili. Contattaci per avere informazioni sui nostri prodotti e conoscere il prezzo per l’elevatore a vano aperto ideale alle tue esigenze di accessibilità chiamandoci al numero verde 800 598078 . Ricordiamo che puoi aderire alle agevolazioni fiscali per l’acquisto dei nostri prodotti ed accedere ad uno dei nostri finanziamenti proposti per acquistare la tua piattaforma idraulica o elettrica in comode rate mensili.
Vorresti maggiori informazioni sull’acquisto di una piattaforma Mobility Care? Contattaci!





















CONTATTACI!
Inserisci i tuoi dati e verrai contattato dal nostro team per offrirti la migliore soluzione per te
gratis e senza impegno
Dicono di noi
Treviso
Via dell’Artigianato, 4
31041 Cornuda (TV)
Bergamo
Via Don Milani, 15A
24050 Cividate Al Piano (BG)
Ricevi notizie sulle nostre soluzioni e molto altro












